咨询热线
15149730476
15149730476

在PAUT和TFM中,都使用多元素探头在测试件中发射脉冲超声波并记录回波的时间轨迹(波形)。然后将这些波形组装在一起,以生成被检查件中反射镜的图像。超声图像可以看作是称为帧的子图像的堆栈。例如,PAUT中的扇区扫描由以不同角度捕获的A扫描(幅度与时间)的排列组成。单独的A扫描在扇形扫描的定义中充当帧。PAUT策略包括以快的方式处理这些帧,实时显示和刷新全局图像。
常规PAUT和TFM之间的根本区别在于信号获取和帧处理策略。
为了演示PAUT中的帧获取过程,此处以S扫描为例。S扫描由单独的帧组成,这些帧对应于在工件中以不同角度捕获的A扫描。在采集过程中,一组元素(称为光圈)同时触发并记录。将一个延迟应用于每个元素,以将超声束控制在所需角度并将其聚焦在部件中的所需深度上。然后,每个帧都由折射角和焦点深度定义。因此,要获取的帧总数是组成全局图像的离散角度数。
PAUT的优势在于它需要进行少量的采集。发射束是各个发射器声振幅材料中“物理求和”的结果,而接收束是从前端电子设备的快速求和能力综合获得的。因此,通过PAUT获得的图像显示速度非常快。PAUT的缺点是帧仅以恒定深度聚焦。位于焦点区域外部的反射器显得模糊,并且比出现在焦点区域中的相同反射器稍大。
总聚焦方法(TFM)有助于解决此分辨率问题。TFM的基本概念是,它可以在多个深度的焦线上显示振幅,从而在任何地方(而不仅仅是在单个深度线上)都可以生成高分辨率图像。
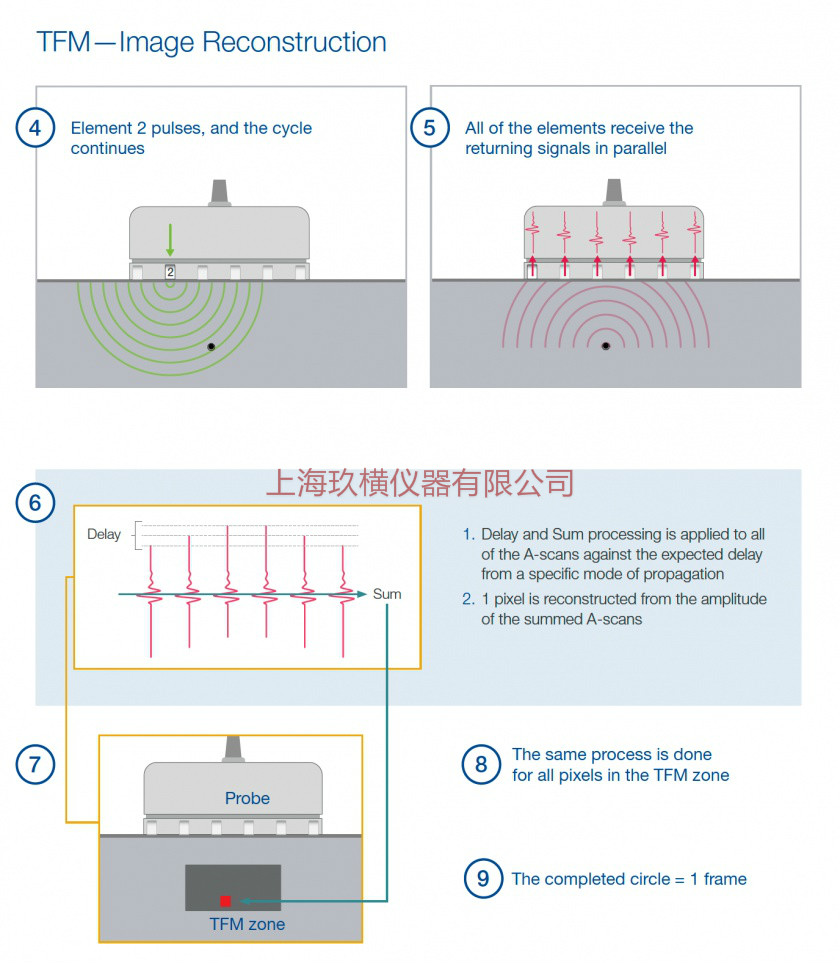
如果将PAUT采集策略(每个帧都需要采集)用于总聚焦方法,则生成TFM图像的时间将大大增加。使用TFM时,构成图像的像素数远远高于生成S扫描所需的离散角度数。例如,扫过752个角度的S扫描需要100次采集,而100×100像素的TFM图像则需要10,000次采集。为避免此问题,使用了另一种采集策略,其中在后处理中计算帧,如图2所示。该策略需要一组与每个像素位置相对应的聚焦定律,以及一组称为全矩阵捕获的原始基本波形。 (FMC)。有了这两个要素,基本波形可以被延迟并适当地求和,以在发送和接收中合成生成超声波束,并聚焦在每个像素位置。因此,生成的图像被“聚焦在任何地方”。
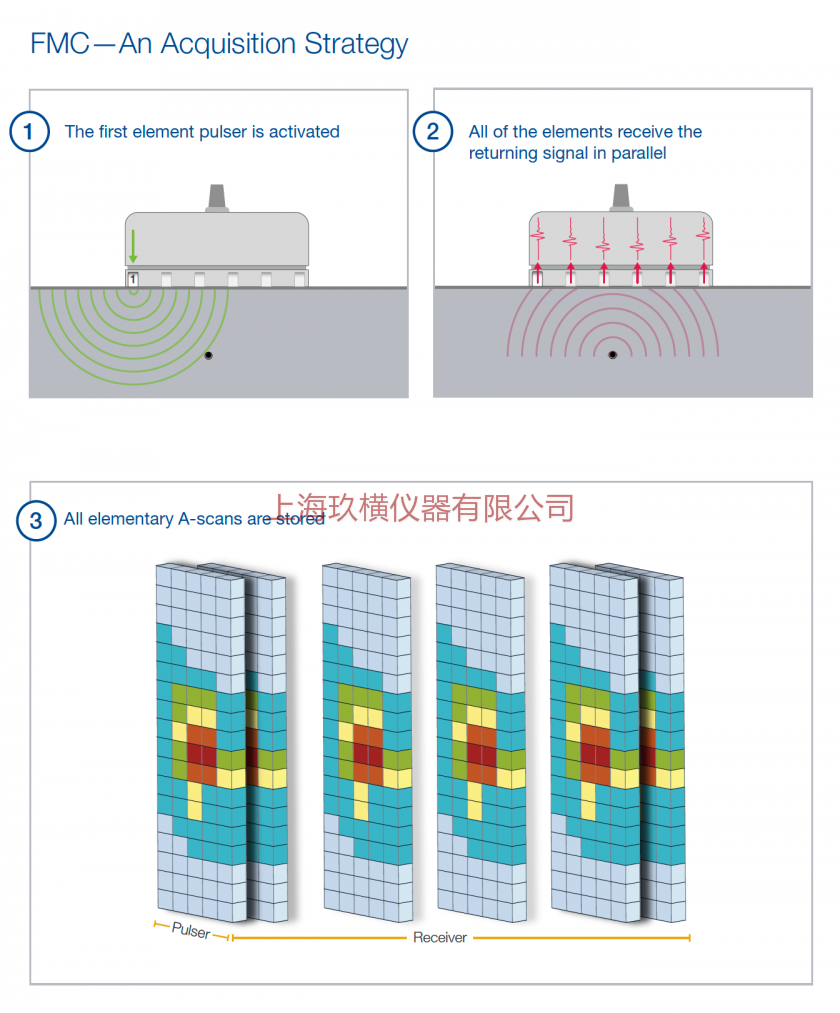
FMC采集所有单独的一对探头元件之间的所有波形。通常使用探头的全光圈,因为它可以为给定的探头设计提供佳的聚焦结果。在这种情况下,构建FMC所需的获取数量等于探针的元素数量。FMC包含有关声音在探头的每个元素之间传播的所有信息,包括界面处的反射和缺陷的散射。可以使用FMC重建任何类型的PAUT采集,包括扇形扫描,平面波成像(PWI),动态深度聚焦(DDF)等。
使用FMC采集过程,生成图像所需的采集次数与PAUT大约相同,但是存储单个FMC数据集需要大量的存储容量,传输带宽和处理能力。根据所用设备的电子设备,获得TFM / FMC结果可能比PAUT慢。
为了说明PAUT和TFM成像中的差异,提出了一种设置,其中使用线性相控阵(PA)探头扫描垂直分布在钢块中的相同侧面钻孔(SDH)。
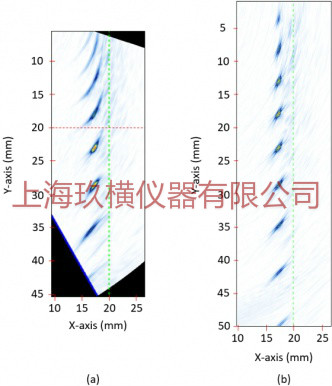
下面介绍了使用OmniScan™X3探伤仪以相同的检查配置获得的PAUT S扫描(a)和TFM图像(b)。
在S扫描中,使用20毫米的一焦距(由红色虚线表示)获取每个帧。位于焦点区域的SDH出现类似的幅度和大小。对于这样的焦距,与较短的焦距相比,图像分辨率佳的区域更大,这说明了这一结果。距焦深较远的SDH出现失真,幅度明显降低。为了使所有SDH的尺寸更均匀,需要具有不同焦距的几幅图像。
在TFM图像(b)中,超声波束聚焦在每个像素上。如您所见,每个SDH都以佳分辨率出现,并且只需要一张图像即可对较大深度范围内的SDH进行适当大小调整。但是,对于位于电子聚焦功能末端的SDH,观察到了横向失真。这种失真是PA成像固有的,因此仍然存在于TFM图像中。

TFM和PAUT之间的主要区别在于组成图像的帧的性质和数量。
在PAUT中,帧是一维信号或A扫描。只有实时的前端电子总和可以用作后处理,并且可以实时获取和显示帧。
另一方面,TFM帧是来自每个像素坐标处聚焦光束的零维数据点。因此,在TFM中要处理的帧数比在PAUT中要处理的帧数要多得多。在后处理中需要FMC采集过程以产生合成聚焦光束。
TFM的主要优点是,与通过PAUT生成的图像相比,以佳分辨率显示整个图像,而PAUT只能在光束的聚焦区域中高度分辨。在使用总聚焦方法时值得注意的一个约束是电子聚焦能力,这是相控阵成像带来的局限性。
上海玖横仪器有限公司是一家专业从事仪器仪表研发、生产、销售及服务的企业。超声波探伤仪:(、、、、USM 36超声探伤仪、USN 60超声探伤仪、USM go+超声探伤仪、Ominscan SX相控阵探伤仪、OmniScan MX2相控阵TOFD探伤仪,新款OmniScan X3全聚焦相控阵超声波探伤仪);超声波测厚仪:(、、、DM5E超声波测厚仪、CL5超声波测厚仪、,);超声波探头;定制相控阵探头;涡流探伤仪:();硬度计;DR平板探测器:1313DX ,1515DXT-I ,2520DX ,2530HE,4343HE, Dexela 1207 ,Dexela 1313 ,Dexela 2121S ,Dexela CMOS平板探测器 ,XRD 0822 ,XRD 1611 ,XRD 1621 ,XRD 4343RF ,XRD 3025 ,XRpad 4336 ,XRpad 4343 F ,XRpad2 3025 ,XRpad2 4336。内窥镜:(IPLEX NX奥林巴斯内窥镜、IPLEX GX/GT奥林巴斯内窥镜、、IPLEX TX奥林巴斯内窥镜、IPLEX YS奥林巴斯内窥镜、XLGo+工业视频内窥镜GE、XL Detect+工业视频内窥镜GE新款、UVin专业紫外视频内窥镜、);脉冲发生器:(DRP300替代奥林巴斯的5072PR,5073PR);合金分析仪:(Vanta奥林巴斯手持式合金分析仪、DELTA Professional手持式合金分析仪奥林巴斯、DELTA Element手持式合金分析仪奥林巴斯)等仪器仪表

 公司地址:上海市奉贤区正博路1881号13幢2253层
公司地址:上海市奉贤区正博路1881号13幢2253层 公司邮箱:
公司邮箱: 公司传真:015-49730476
公司传真:015-49730476
